Table of Contents
Construct()
Constructs the armature’s bones with inheritance and inverse kinematics.
function Construct(armature: Armature): Bone[] {
// initialize constructed_bones
if (armature.constructed_bones == undefined) {
armature.constructed_bones = clone(armature.bones);
} else {
// constructed_bones may have been used later for drawing
// which sorts them by zindex, so sort back by id
armature.constructed_bones.sort((bone) => bone.id);
}
// inheritance is run once to put bones in place,
// for inverse kinematics to properly determine rotations
resetInheritance(aramture.constructed_bones, armature.bones);
inheritance(armature.constructed_bones, {}, {});
// inverse kinematics will return which bones' rotations should be overridden
ikRots: Object = inversekinematics(
armature.constructed_bones,
armature.ikRootIds,
);
// run inheritance again for IK rotations
resetInheritance(aramture.constructed_bones, armature.bones);
inheritance(armature.constructed_bones, ikRots, {});
// process physics
simulate_physics(armature.bones, armature.constructed_bones)
// run inheritance again for physics
resetInheritance(aramture.constructed_bones, armature.bones);
inheritance(armature.constructed_bones, ikRots, armature.bones);
// mesh deformation
constructVerts((armature.constructed_bones);
}
inheritance()
Child bones need to inherit their parent.
inheritance(bones: Bone[], ikRots: Object, armature_bones: Bone[]) {
for(let b = 0; b < bones.length; b++) {
if(bones[b].parentId != -1) {
parent: Bone = bones[bones[b].parentId];
let orbit_rot = bones[bones[b].parent_id as usize].rot
// apply orbital difference, if rotation resistance physics is active
if armature_bones.len() > 0 && armature_bones[b].phys_sway > 0 {
orbit_rot -= armature_bones[b].phys_global_orbit_diff
}
bones[b].rot += orbit_rot
bones[b].scale *= parent.scale
// adjust child's distance from player as it gets bigger/smaller
bones[b].pos *= parent.scale
// rotate child around parent as if it were orbitting
bones[b].pos = rotate(&bones[b].pos, parent.rot)
bones[b].pos += parent.pos
}
// override bone's rotation from inverse kinematics
if ikRots[b] {
bones[b].rot = ikRots[b]
}
// apply physics, if armature_bones is provided
if armature_bones.len() > 0 {
if bones[b].phys_rot_damping > 0. {
bones[b].rot = armature_bones[b].phys_global_rot
}
if bones[b].phys_pos_damping > 0. {
bones[b].pos = armature_bones[b].phys_global_pos
}
if bones[b].phys_scale_damping > 0. {
bones[b].scale = armature_bones[b].phys_global_scale
}
}
}
}
resetInheritance()
Resets the provided constructed_bones to their original transforms.
Must always be called before inheritance().
resetInheritance(constructed_bones: Bone[], bones: Bone[]) {
for(let b = 0; b < bones.length; b++) {
}
}
rotate()
Helper for rotating a Vec2.
function rotate(point: Vec2, rot: f32): Vec2 {
return Vec2 {
x: point.x * rot.cos() - point.y * rot.sin(),
y: point.x * rot.sin() + point.y * rot.cos(),
}
}
inverseKinematics()
Processes inverse kinematics and returns the final bones’ rotations, which would
later be used by inheritance().
IK data for each set of bones is stored in the root bone, which can be iterated
wth ikRootIds.
function inverseKinematics(bones: Bone[], ikRootIds: int[]): Object {
ikRot: Object = {}
for(let rootId of ikRootIds) {
family: Bone[] = bones[rootId]
// get relevant bones from the same set
if(family.ikTargetId == - 1) {
continue
}
root: Vec2 = bones[family.ikBoneIds[0]].pos
target: Vec2 = bones[family.ikTargetId].pos
familyBones: Bone[] = bones.filter(|bone|
family.ikBoneIds.contains(bone.id)
)
// determine which IK mode to use
switch(family.ikMode) {
case "FABRIK":
for range(10) {
fabrik(*familyBones, root, target)
}
case "Arc":
arcIk(*familyBones, root, target)
}
pointBones(*bones, family)
applyConstraints(*bones, family)
// add rotations to ikRot, with bone ID being the key
for(let b = 0; b < family.ikBoneIds.length; b++) {
// last bone of IK should have free rotation
if(b == family.ikBoneIds.len() - 1) {
continue
}
ikRot[family.ikBoneIds[b]] = bones[family.ikBoneIds[b]].rot
}
}
return ikRot
}
pointBones()
Point each bone toward the next one.
Used by inverseKinematics() to get the final bone’s rotations.
function pointBones(bones: Bone[]*, family: Bone) {
endBone: Bone = bones[family.ikBoneIds[-1]]
tipPos: Vec2 = endBone.pos
for(let i = family.ikBoneIds.length - 1; i > 0; i--) {
bone = *bones[family.ikBoneIds[i]]
dir: Vec2 = tipPos - bone.pos
bone.rot = atan2(dir.y, dir.x)
tipPos = bone.pos
}
}
applyConstraints()
Applies constraints to bone rotations (clockwise or counter-clockwise).
- Get angle of first joint
- Get angle from root to target
- Compare against the 2 based on the constraint
- If the constraint is satisfied, apply
rot + baseAngle * 2to bone rotation
function applyConstraints(bones: Bone[], family: Bone) {
jointDir: Vec2 = normalize(bones[family.ikBoneIds[1]].pos - root);
baseDir: Vec2 = normalize(target - root);
dir: float = jointDir.x * baseDir.y - baseDir.x * jointDir.y;
baseAngle: float = atan2(baseDir.y, baseDir.x);
cw: bool = family.ikConstraint == "Clockwise" && dir > 0;
ccw: bool = family.ikConstraint == "CounterClockwise" && dir < 0;
if (ccw || cw) {
for (let id of family.ikBoneIds) {
bones[id].rot = -bones[id].rot + baseAngle * 2;
}
}
}
fabrik()
The FABRIK mode (Forward And Backward Reaching Inverse Kinematics).
Note that this should be run multiple times for higher accuracy (usually 10 times).
Source for algorithm: Programming Chaos’ FABRIK video
function fabrik(bones: Bone[], root: Vec2, target: Vec2) {
// forward-reaching
nextPos: Vec2 = target;
nextLength: float = 0.0;
for (let b = bones.length - 1; b > 0; b--) {
length: Vec2 = normalize(nextPos - bones[b].pos) * nextLength;
if (isNaN(length)) length = new Vec2(0, 0);
if (b != 0) nextLength = magnitude(bones[b].pos - bones[b - 1].pos);
bones[b].pos = nextPos - length;
nextPos = bones[b].pos;
}
// backward-reaching
prevPos: Vec2 = root;
prevLength: float = 0.0;
for (let b = 0; b < bones.length; b++) {
length: Vec2 = normalize(prevPos - bones[b].pos) * prevLength;
if (isNaN(length)) length = new Vec2(0, 0);
if (b != bones.len() - 1)
prevLength = magnitude(bones[b].pos - bones[b + 1].pos);
bones[b].pos = prevPos - length;
prevPos = bones[b].pos;
}
}
arcIk()
Arcing IK mode.
Bones are positioned like a bending arch, with the max length being the combined distance of each bone after the other.
function arcIk(bones: Bone[], root: Vec2, target: Vec2) {
// determine where bones will be on the arc line (ranging from 0 to 1)
dist: float[] = [0.]
maxLength: Vec2 = magnitude(bones.last().pos - root)
currLength: float = 0.
for(let b = 1; b < bones.length; b++) {
length: float = magnitude(bones[b].pos - bones[b - 1].pos)
currLength += length;
dist.push(currLength / maxLength)
}
base: Vec2 = target - root
baseAngle: float = base.y.atan2(base.x)
baseMag: float = magnitude(base).min(maxLength)
peak: float = maxLength / baseMag
valley: float = baseMag / maxLength
for(let b = 1; b < bones.length; b++) {
bones[b].pos = new Vec2(
bones[b].pos.x * valley,
root.y + (1.0 - peak) * sin(dist[b] * PI) * baseMag,
)
rotated: float = rotate(bones[b].pos - root, baseAngle)
bones[b].pos = rotated + root
}
}
simulatePhysics()
Processes all physics:
- Position (
phys_pos_damping) - Scale (
phys_scale_damping) - Rotation (
phys_rot_damping) - Sway (
phys_sway) - Bounce (
phys_rot_bounce)
function simulatePhysics(armature_bones, constructed_bones) {
for(let b = 0; b < armature_bones.length; b++) {
let s = Vec2(0.3, 0.3)
let e = Vec2(0.6, 0.6)
let arm_bone = &mut armature_bones[b]
let const_bone = &constructed_bones[b]
let prev_pos = arm_bone.phys_global_pos
// interpolate position
if(arm_bone.phys_pos_damping > 0 || arm_bone.phys_sway > 0) {
let phys_pos = &arm_bone.phys_global_pos
let damping = Vec2(arm_bone.phys_pos_damping, arm_bone.phys_pos_damping)
// ratio
if(arm_bone.phys_pos_ratio < 0) {
damping.y *= 1. - Math.abs(arm_bone.phys_pos_ratio)
} else if(arm_bone.phys_pos_ratio > 0) {
damping.x *= 1. - arm_bone.phys_pos_ratio
}
cb_scale = const_bone.scale
phys_pos.x = interpolate(2, damping.x, phys_pos.x, const_bone.pos.x, s, e)
phys_pos.y = interpolate(2, damping.y, phys_pos.y, const_bone.pos.y, s, e)
}
// interpolate scale
if(arm_bone.phys_scale_damping > 0) {
let phys_scale = &arm_bone.phys_global_scale
let damping = Vec2(arm_bone.phys_scale_damping, arm_bone.phys_scale_damping)
// ratio
if(arm_bone.phys_scale_ratio < 0) {
damping.y *= 1. - Math.abs(arm_bone.phys_scale_ratio)
} else if(arm_bone.phys_pos_ratio > 0) {
damping.x *= 1. - arm_bone.phys_scale_ratio
}
cb_scale = const_bone.scale
phys_scale.x = interpolate(2, damping.x, phys_scale.x, cb.scale.x, s, e)
phys_scale.y = interpolate(2, damping.y, phys_scale.y, cb.scale.y, s, e)
}
// interpolate rotation
if(arm_bone.phys_rot_damping > 0) {
let rot = shortest_angle_delta(arm_bone.phys_global_rot, const_bone.rot)
arm_bone.phys_global_rot += rot / arm_bone.phys_rot_damping
}
// interpolate parent orbit (rot res, bounce, etc)
let parent = constructed_bones.find((b) => b.id == const_bone.parent_id)
if(arm_bone.phys_sway > 0 && parent != None) {
// 1. get the raw orbit angle between this bone and its parent
let diff = normalize(const_bone.pos - parent.pos)
let diff_angle = Math.atan2(diff.y, diff.x)
// 2. interpolate current orbit angle to raw angle
let orbit_buffer = shortest_angle_delta(arm_bone.phys_global_orbit, diff_angle)
// 3. apply bounce to orbit angle
if(arm_bone.phys_rot_bounce > 0. && arm_bone.phys_rot_bounce <= 1) {
orbit_buffer += arm_bone.phys_global_orbit_vel / (2 - arm_bone.phys_rot_bounce)
arm_bone.phys_global_orbit_vel = rest_rot
}
// 4. apply orbit buffer
arm_bone.phys_global_orbit += orbit_buffer / 10
// 5. swing orbit based on position momentum
let vel = normalize(arm_bone.phys_global_pos - prev_pos)
let angle = Math.atan2(-vel.y, -vel.x)
let vel_rot = shortest_angle_delta(arm_bone.phys_global_orbit, angle)
let strength = magnitude(arm_bone.phys_global_pos - prev_pos) / 1000
arm_bone.phys_global_orbit += vel_rot * strength * arm_bone.phys_sway
// 6. apply difference in raw angle and orbit
arm_bone.phys_global_orbit_diff = diff_angle - arm_bone.phys_global_orbit
}
}
}
constructVerts()
Constructs vertices, for bones with mesh data.
Note: a helper function (inheritVert()) is included in the code block below
function constructVerts(bones: Bone[]) {
for(let b = 0; b < bones.length; b++) {
bone: Bone = bones[b]
// Move vertex to main bone.
// This will be overridden if vertex has a bind.
for(let v = 0; v < bone.vertices.length; v++) {
bone.vertices[v].pos = bone.vertices[v].init_pos;
bone.vertices[v] = inheritVert(bone.vertices[v].pos, bone)
}
for(let bi = 0; bi < bones[b].binds.length; bi++) {
let boneId = bones[b].binds[bi].boneId
if boneId == -1 {
continue
}
bindBone: Bone = bones.find(|bone| bone.id == bId))
bind: Bind = bones[b].binds[bi]
for(let v = 0; v < bind.verts.length; v++) {
id: int = bind.verts[v].id
if !bind.isPath {
// weights
vert: Vertex = bones[b].vertices[id]
weight: float = bind.verts[v].weight
endpos: Vec2 = inheritVert(vert.initPos, bindBone) - vert.pos
vert.pos += endPos * weight
continue
}
// pathing
// Check out the 'Pathing Explained' section below for a
// comprehensive explanation.
// 1.
// get previous and next bind
binds: Bind[] = bones[b].binds
prev: int = bi > 0 ? bi - 1 : bi
next: int = min((bi + 1, binds.length - 1)
prevBone: Bone = bones.find(|bone| bone.id == binds[prev].boneId)
nextBone: Bone = bones.find(|bone| bone.id == binds[next].boneId)
// 2.
// get the average of normals between previous and next bind
prevDir: Vec2 = bindBone.pos - prevBone.pos
nextDir: Vec2 = nextBone.pos - bindBone.pos
prevNormal: Vec2 = normalize(Vec2.new(-prevDir.y, prevDir.x))
nextNormal: Vec2 = normalize(Vec2.new(-nextDir.y, nextDir.x))
average: Vec2 = prevNormal + nextNormal
normalAngle: float = atan2(average.y, average.x)
// 3.
// move vert to bind, then rotate it around bind by normalAngle
vert: Vertex = bones[b].vertices[id]
vert.pos = vert.initPos + bindBone.pos
rotated: Vec2 = rotate(vert.pos - bindBone.pos, normalAngle)
vert.pos = bindBone.pos + (rotated * bind.verts[v].weight)
bones[b].vertices[id] = vert
}
}
}
}
function inheritVert(pos: Vec2, bone: Bone): Vec2 {
pos *= bone.scale
pos = utils.rotate(&pos, bone.rot)
pos += bone.pos
return pos
}
Pathing Explained
Instead of inheriting binds directly, vertices can be set to follow its bind like a line forming a path:
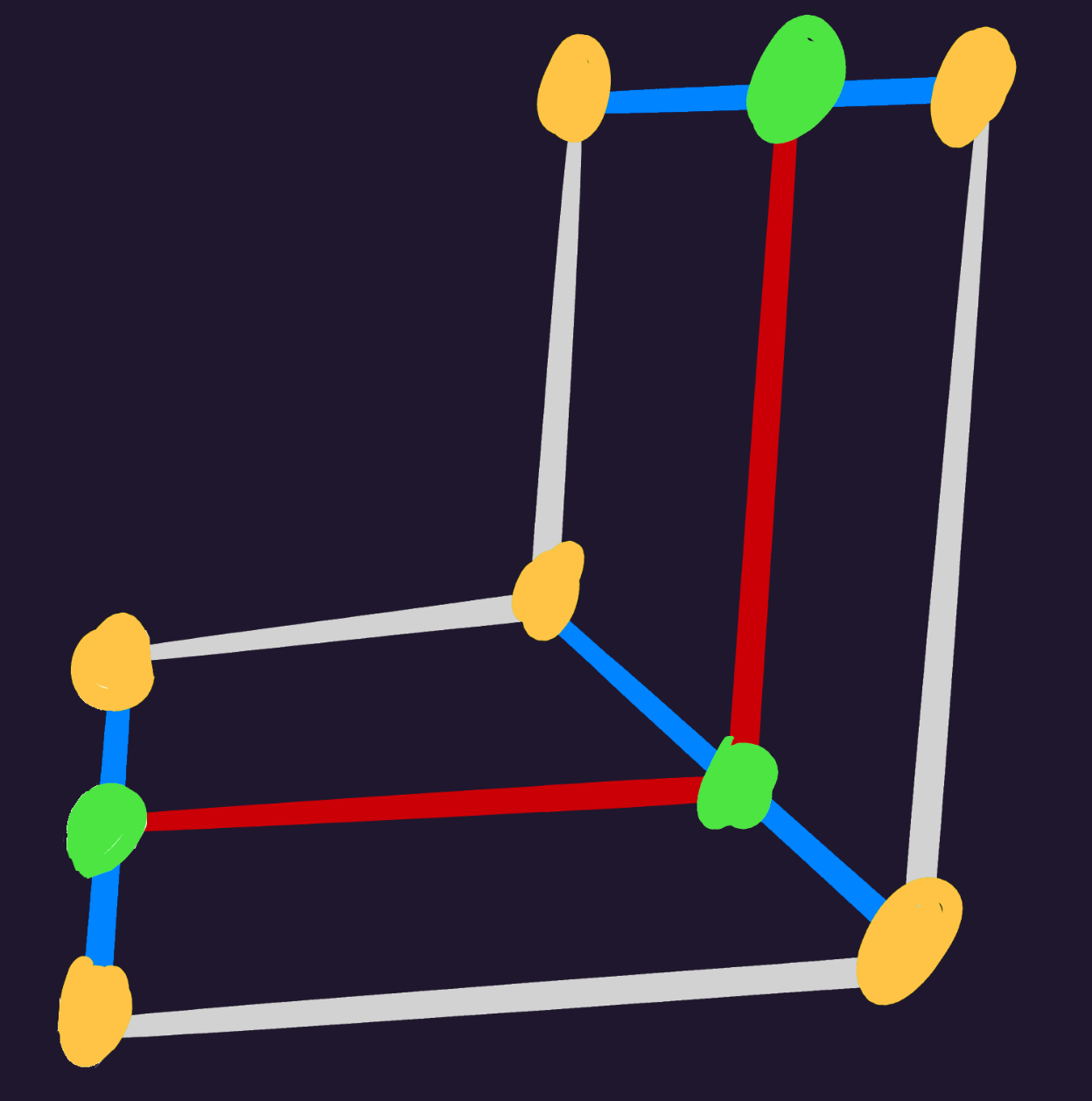
- Green - bind bone
- Orange - vertices
- Red - imaginary line from bind to bind
- Blue - Normal surface of imaginary line
Vertices will follow the path, distancing from the bind based on its surface angle and initial position from vertex to bind.
The following steps can be iterated per bind:
1. Get Adjacent Binds
To form the imaginary line, get the adjacent binds just before and just after the current bind. In particular:
- If current bind is first: get only next bind
- If current bind is last: get only previous bind
- If current bind is neither: get both previous and next bind
2. Get Average Normal Angle
Notice that in the diagram, the middle bind’s surface is at a 45° angle.
To do so:
- Get line from previous to current bind
- Get line from current to next bind
- Add up both lines
- Get angle of combined line
3. Rotate Vertices
- Reset vertex position to its initial position + bind position
- Rotate vertex around bind with angle from 2nd step